Mini-Workshop on 'Low power and adaptive computer vision for scene understanding’
Friday 24 March 2017
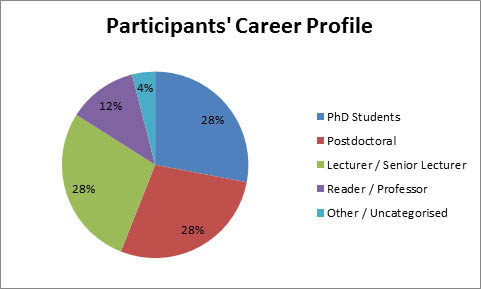
The workshop differed from traditional presentation style workshop structure and engaged participants by a number of brainstorming sessions and discussions in a non-academic setting. The workshop was pleasantly successful if measured by the responses received for participation, diversity of the participants and the quality of the discussions during the workshop. Geographically the participants travelled from all over the UK including St Andrews, Edinburgh, Nottingham, Lincoln, Oxford, Cambridge, Manchester and Sheffield. We had around 20 participants on the day representing various career profile and research expertise.
Motivation
Scene understanding and prompt reaction to an interesting event is a critical feature for any time critical computer vision systems for safe and reliable interaction with the environment. The deployment scenarios include a range of applications such as mobile robotics, autonomous cars, mobile and wearable devices or public space surveillance (airport / railway station). Modern vision systems which play a significant role in such interaction process require higher level scene understanding with ultra-fast processing capabilities operating at extremely low power.
Current systems rely on traditional computer vision techniques which often follow compute intensive brute-force approaches and prone to fail in environments with limited power, bandwidth and computing resources. The machine vision community can be benefited from biological vision of animals and insects which are task oriented and operates on extremely low power. The aim of this workshop is discussing biologically inspired machine vision systems that are low power, computationally efficient and adaptive.

Keynote 1: Professor Wayne Luk

Participants during brainstorming session
The workshop had two guest lectures, one in the morning and the other in the afternoon, presented by Professor Wayne Luk, Imperial College London and Professor Jenny Reads, Newcastle University, Newcastle, and a series of brain storming sessions. The presentation slides are available from links below
- Towards smart sensing based on field-programmable technology, Professor Wayne Luk, Imperial College
- What makes insect vision special?, Professor Jenny Read, Newcastle University
This workshop brought together researchers from various backgrounds to exchange ideas and discuss various research challenges and opportunities. A broad outline of the research topics that were discussed are listed below
1. Brainstorming Session I: Scene understanding, its applications and computer vision based approaches
Within this session the participants discussed various aspects of scene understanding and related vision applications. Although scene understanding research emerged really quickly in past couple years, the computational models are far from perfect. It was also discussed to construct models from perception from other modalities (not only vision).
2. Brainstorming Session II: Power efficient accelerated image processing hardware design and importance of sparse and approximate computing
Current computer vision algorithms for scene understanding are often complex in nature and require significant computational resources thus limiting applications that need remote real-time processing eg mobile robots, unmanned aerial vehicles (UAV). Research efforts are needed for an accelerated, power efficient embedded visual processing hardware. We discussed how sparse and approximate computing. For all architectures, memory bandwidth is an issue. In considering custom hardware, ASICs go out of date too quickly while algorithmic optimisation is required for FPGA or many-core architecture. Again programming is an issue. Hardware with good support for both parallelism and control flow is important.
3. Brainstorming Session III: Mimicking biological vision in designing efficient vision system, e.g. Multiple low-resolution visual sensors
During this brainstorming session we discussed about mimicking biological vision for power efficient accelerated architecture. Current bottleneck is on transferring and processing high resolution images in real-time. One can think of multiple low-resolution visual sensors with local processors mimicking 'bee-vision'. The approach can be benefited from compressive sensing theory. The application areas include navigation or building SLAM (Simultaneous Localisation and Mapping).

Keynote 2: Professor Jenny Read

During stereo vision demo
4. Brainstorming Session IV: The application of task oriented scene understanding in robotic vision
Robotics was identified as one of the priority research areas by UKRC. The application of task oriented scene understanding in robotic vision can offer interesting research directions. In the final brain storming session we talked about goal oriented vs task orient scene understanding. Some kind of prior knowledge is important to aid the scene understanding. Understanding also requires some form of interaction which is a challenge. Reasoning at object rather than pixel level is important. There is a good potential of such research in various robotic applications which includes primarily navigation, object detection and pattern matching.
We concluded to take this activity further given the importance of this research. Potentially a linked community might be useful. A formal presence in an established conference in the form of special session or workshop is an option and strongly recommended by the participants. The participants expressed their satisfaction by taking part in this event.
For further details, please contact Dr Deepayan Bhowmik at deepayan.bhowmik@shu.ac.uk